航空航天:等离子喷涂热障涂层在发动机涡轮叶片上的应用
436**等离子喷涂热障涂层(Thermal Barrier Coating, TBC)**是专为提高发动机涡轮叶片性能而设计的先进解决方案。通过使用先进的等离子喷涂技术,在发动机涡轮叶片表面喷涂热障涂层,显著提升其耐高温性能、抗热疲劳能力和使用寿命。
查看全文全站搜索
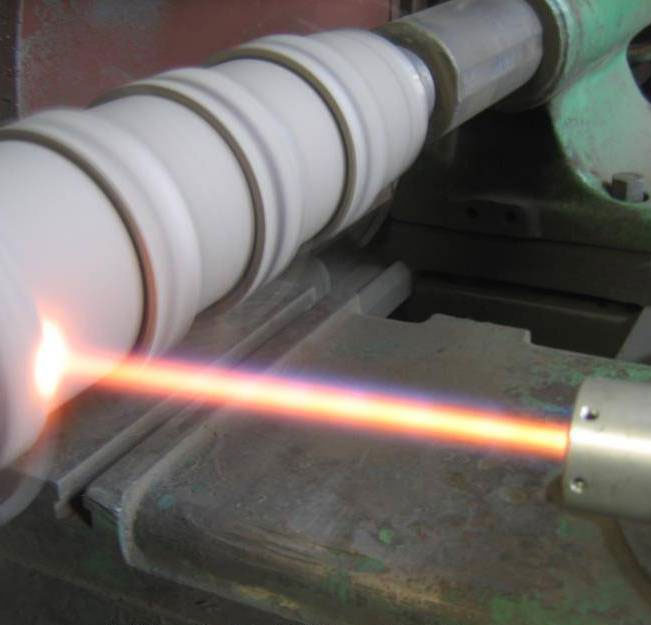

**等离子喷涂热障涂层(Thermal Barrier Coating, TBC)**是专为提高发动机涡轮叶片性能而设计的先进解决方案。通过使用先进的等离子喷涂技术,在发动机涡轮叶片表面喷涂热障涂层,显著提升其耐高温性能、抗热疲劳能力和使用寿命。
查看全文
广州三鑫公司SX-80等离子设备以及机器人、喷涂转台、隔音房、除尘器、喷砂机等全套等离子喷涂实验生产线在江苏中科战略研究所通过验收
查看全文
广州三鑫通过使用先进的等离子喷涂技术,采用SX-80等离子喷涂设备在石墨舟皿上喷涂氧化钇(Y₂O₃)和氧化锆(ZrO₂)涂层,显著提升其耐高温性能、抗氧化性和使用寿命。
查看全文

您好!请登录